Machine Learning (ML) gets a lot of hype, but its Classical predecessors are still immensely powerful, especially in the time-series space. Error, Trend, Seasonality Forecast (ETS), Autoregressive Integrated Moving Average (ARIMA), and Holt-Winters are three Classical methods that are not only incredibly popular but are also excellent time-series predictors.
In fact, according to Statistical and Machine Learning forecasting methods: Concerns and ways forward, ETS outperforms several other ML methods including Long Short Term Memory (LSTM) and Recurrent Neural Networks (RNN) in One-Step Forecasting. Actually, all of the statistical methods have a lower prediction error than the ML methods do.
Let's Unplugged the Basics of Time Series classical Approach
· Basics – Time Series Modeling
o Forecasting mainly works with time series data, where the data points are instances of the same feature being captured at different points in time.
o A time series is basically a function of time over any data. As time increases or decreases, the value of that data varies.
o Always remember in time series,
· Y(t): The current given time series
· Y(t-1): The current given time series shifted by 1 time period.
·
· In Y(t) always error term will be there but in prediction error terms are not there
e.g:
· Any time series has 3 components:
o Trend: Continuous increase or decease of values as a function of time.
o Seasonality: A predictable repeating pattern within a year.
o Cyclic: A repeating pattern.
o Randomness: Error
· Methods used in forecasting
****************************
a. SMA
b. Exponential smoothing (Giving weightage to the most recent time period )
St=α∑i=1t−2(1−α)i−1yt−i+(1−α)t−2S2,t≥2.
c. Holt Winters (Alpha: Level, Beta: Trend, Gamma: Seasonality)
d. ARMA
e. ARIMA
· What is Seasonality?
o Seasonality is a predictable repeating pattern within a year.
o How to remove seasonality (in order to make the TS stationary):
· Trend or MA does not work in some cases. E.g. If the demonetization happens in Nov. And the sales or revenue of Aug, Sep and Oct are in lakhs and for Nov its in thousands, then if we forecast using MA, then the revenue for Dec will b in lakhs (the avg. of 4 months) which is incorrect as still the market is down.
· What is Auto Correlation?
o Auto correlation is the correlation between the variable and itself at previous time stamps (Also called as lagged values or past values)
o It is also called serial correlation because of the sequenced structure of time series data.
o
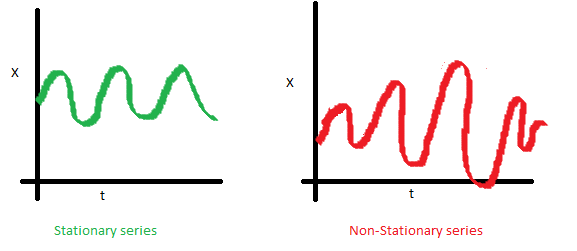
· What is a Stationary and Non-Stationary time series?
o A time series is stationary if it satisfies the below conditions:
· The mean is constant.
· The standard deviation is constant.
· There should NOT be any Seasonality.
· In the first case, mean is constant, SD not constant, Seasionality is absent.
· In the second case, mean is not constant, SD is constant, Seasionality is absent.
· In the third case, mean is not constant, SD is constant, Seasionality is present.
o To check for Stationarity, we have 3 methods.
· Plot the time series and check the above 3 conditions then through visualization.
· Global vs Local Test. i.e. Divide the TS into small small chunks and check if the above 3 conditions are getting satisfied. e.g. Local mean of a small chuck should be same as the global mean.
· Augmented Dickey Fuller Test (ADF Test). (Statistical technique and much more stronger than above both)
o To convert a non stationary time series to Stationary, we Detrend it. Or in other words we apply first order differencing.
o Now as we can see, after differencing, the mean value of Z(t) is a constant and the variance is also constant and there is no seasonality.
o Now we can apply this Z(t) time series in any time series modelling like Auto regressive, MA, ARMA etc..
o Note: As Z(t) is the difference of Y(t), it will have one time point less than Y(t). e.g. If Y(t) has y1, y2, y3… Z(t) will have z1(y2-y1) and z2(y3-y2).
· What is White Noise?
o A time series is classified as white noise if:
· The mean is ZERO.
· The standard deviation is constant.
· There should not be any Seasonality. i.e. The correlation between the lags should be Zero.
o If the time series is White Noise, then we cant predict anything out of it.
o To check for White Noise, we have 3 methods.
· Plot the time series and check the above 3 conditions then through visualization.
· Global vs Local Test. i.e. Divide the TS into small small chunks and check if the above 3 conditions are getting satisfied. e.g. Local mean of a small chuck should be same as the global mean.
· Do the ACF plot and check if all the correlations of lags are zero/statistically zero (Do not cross the red band).
· What Is the Random Walk Theory?
o Random walk theory suggests that changes in stock prices have the same distribution and are independent of each other. Therefore, it assumes the past movement or trend of a stock price or market cannot be used to predict its future movement.
o What is ACF and PACF?
o ACF is an (complete) Auto-Correlation Function which basically describes how well the present value of the series is related with its past values.
o It gives the direct correlation between the observation at current timespot and the observation at previous time spots.
o e.g. To measure how strong today's stock price is correlated with yesterday's stock price, we can calculate by ACF.
o e.g. To measure how strong today's stock price is correlated with (today-2)'s stock price, we can calculate by ACF.
o This is used in mostly MA models.
o PACF or Partial Auto-Correlation Function also measures the correlation of two days. But here we also consider the influence of other days to these 2 days.
o Suppose we want to calculate the correlation of stock prices between today's and yesterday's. But today and yest stock prices are influenced by the stock price of day before yesterday. Hence ACF might not give the correct correlation.
o We need to take out the influence of day before stock price. This is what PACF does. Hence in Auto regressive(AR) models mostly PACF is used.
o What is the process of ACF/PACF?
o Detrend the data first if trend is there. i.e. Use differencing the data. (One lag diiferencing)
o Now in order to apply ACF or PACF, we need to plot the ACF and PACF charts. Only number of significacnt variables will be chosen.
o Let's say only one significant variable is chosen (only yesterday's stock proce), then it is called first order AR/MA model.
o In the above plots we have the correlations of stock prices of lags(i.e. yesterday, day before yest and so on…) with respect to today's stock prices, have been plotted.
o As in the above example, the order of AR model is 2(only the correlation of yesterday's stock price and day before yest stock prive with today's stock price are significacnt), but for MA model is 10. Hence we are choosing AR model. Other wise our model will be too complex due to the involvement of so many features.
o Now in the above example, in one way we can choose 3rd order AR model. i.e. AR(3). Or in another way, we can choose first order AR and first order MA model. i.e. ARMA(1,1), as the influence of stock prices of only yesterday(i.e. Yesterday's ACF and PACF values) is most significant in both the cases.
o Now "I" stand for "Integrated". It represents the differencing we do to handle non-stationary data. i.e. Detrending the time series by differencing. If it is the first order differencing then we can write it as ARIMA(1,1,1). If no detrending has been done then we can write it as ARIMA(1,0,1). Now, if we have to choose the model between ARIMA(1,1,1) and ARIMA(1,2,1), then we choose the model with minimum error terms. These (1,1,1) are aldo called as p,d,q values. In general ARIMA(p,d,q)
o Hence, first plot the ACF and PACF plots. If we did not find any significant correlations, then apply first order differencing. If even after applying first order differencing and plotting ACF and PACF plots, we did not find any significant correlation, then the seris is called Random Walk. We can not apply ARMA model for this. We have to consider some other modelling technique for the data analysis.
· What is a Autoregression model (AR Model)?
o It is a specific type of regression model where we predict the values of a variable based on its lagged or past values.
o A q-order autoregressive process, denoted AR(q), takes the form
o But here all the Yi are not considered. Only those are considered whose partial correlations are significant with the present time point. This is calculated by the PACF plot
o Now for weights, we depend upon the magnitude of the correlation. The stronger the correlation between the output variable and a specific lagged variable, the more weight that autoregression model can put on that variable when modeling.
o Lets consider the example: Predicting the amount of milk that will be demaned for this month based on my past demands of milk.
· M(t): The amount of milk demand at present.
·
· M(t-1): The amount of milk demanded last month.
· M(t-12): The amount of milk demanded 12 months ago.
o Now among all these M(t-*) we have to determine which lags (or M(t-*)) are important for predicting M(t). For this we consider PACF function to determine which lags have mostly partially correlated
o Now here in this PACF plot we can see the lags 1, 2, 4, 12 are crossing the red mark. Hence the corresponding lags (M(t-1), M(t-2), M(t-4) and M(t-12)) are important for predicting M(t).
o Hence my model will be:
o Hence the quantity of milk demanded today(Actual value) is based upon the quantity of milk demanded 1 month ago, 2 months ago, 4 months ago and 12 months ago.
o
· What is a Moving Averages model (MA Model)?
o Moving Averages model basically predicts the value of a variable as the mean of that variable increased or decreased by an amount equivalent to the error term of the previous month.
o So the function of of MA model can be represented as:
§ Error(t-1): (t-1) prediction - (t-1) actual… i.e. Previous month prediction - Previous month actual
§ Error(t-2): Last to Last month prediction - Last to Last month actual
o Now to select which error lags are significant, we have to take help from ACF plot.
o How to know we have to apply MA model:
· If in the ACF plot the correlation is zero after some particular point(let it be q), but before that point the all are non-zero correlations, then we can apply MA(q) model.
· What is a Auto Regressive Moving Average model (ARMA Model)?
o ARMA model implements both the concepts from AR and MA models. i.e. It considers the values of lagged timespots(AR) as well as the error values of lagged timespots(MA).
· What is a Auto Regressive Conditional HeteroSkedasticity model (ARMA Model)?
o This model basically helps to predict the error based upon the previous timespot errors.
o Mathematically,
o To know which of the error lags are significant we determine it through the correlogram.
· What is SARIMA model?
o One big disadvantage of ARIMA model is that, it does not consider Seasonal time series.
o SARIMA model considers the seasonal component of the time series.
o We represent it through: SARIMA(p,d,q)(P,D,Q)m
· Trend Elements
There are three trend elements that require configuration.
They are the same as the ARIMA model; specifically:
§ p: Trend autoregression order.
§ d: Trend difference order.
§ q: Trend moving average order.
· Seasonal Elements
There are four seasonal elements that are not part of ARIMA that must be configured; they are:
§ P: Seasonal autoregressive order.
§ D: Seasonal difference order.
§ Q: Seasonal moving average order.
§ m: The number of time steps for a single seasonal period.
Trend Analysis using Moving Average techniques
Moving averages are an important analytical tool used to identify current trends and the potential for a change in an established trend.
The methods available in this notebook are the following:
1. Simple Moving Average
2. Exponentially Weighted Moving Average / Exponential Moving Average
3. Autoregressive integrated moving average (ARIMA)
2. Exponentially Weighted Moving Average / Exponential Moving Average
3. Autoregressive integrated moving average (ARIMA)
Simple moving average (SMA), which is the most basic type of moving average, is calculated by taking a series of points in a time window, then taking the average of the data points in the time window. Each data point is weighted equally, irrespective of when it happened.
An exponential moving average (EMA) is similar to a simple moving average, but whereas a simple moving average removes the oldest prices as new prices become available, an exponential moving average calculates the average of all historical ranges, starting at the point you specify.
SMA reduces the noise associated with fluctuating rates making it easier to identify trends and trend reversal points, but it is slow to react to latest rates. Generally, these techniques are used in combination to analyse trend.
An autoregressive integrated moving average (ARIMA) model is a generalization of an autoregressive moving average (ARMA) model. Both of these models are fitted to time series data either to better understand the data or to predict future points in the series (forecasting). ARIMA models are applied in some cases where data show evidence of non-stationarity, where an initial differencing step (corresponding to the “integrated” part of the model) can be applied one or more times to eliminate the non-stationarity.
The output of these techniques will be displayed in a line chart. An example chart is shown below:
ARIMA:
NOTE:
Make sure that the external dataset is present in the path defined for hdfs_path in the block below (default path: /models/forecasting/trend_analysis/dataset ).
o For forecasting, 3 main libraries are required.
o Forecast
o TTR
o Fpp2
i.e. [(Actual - Predicted) / Actual] * 100/N
· For Practicals
*************************
1. Take the data collected over a period of time.
2. Convert to time series by ts(data, frequency, start, end)
3. Plot it using plot.ts or autoplot
4. Decompose it to get the insights from the time series. It can be additive or multiplicative. (In additive the magnitude of series for each cycle is constant where as in multiplicative the magnitude might not which is to be looked from the original time series plot)
5. Apply Dicky Fuller Test to check the TS is stationary or not.
· If Rho=1: Time Series is not stationary (Null Hypothesis)
· If Rho<1: hypothesis="" is="" lternative="" o:p="" series="" stationary="" time="">
6. To make the ts stationary calculate the difference by
tsstationary = diff(tsData, differences=1)
7. Apply SMA of different orders and plot it using plot.ts
8. Apply HoltWinters by
kingsholtwinters = HoltWinters(kingstimeseries, beta = F, gamma=F) //alpha: trend, beta: ex smoothing, gamma seasonality
9. forecasts = forecast:::forecast.HoltWinters(kingsholtwinters, h = 12) //h: time period u want to forecast
10. Calculate RMSE and MAPE
11. mape = mean((abs(err)/birthtest)*100)
12. For applying ARIMA:
13. Calculate the pdq values from acf and pacf plots or apply auto.arima
· sk.arima = auto.arima(skseries)
· sk.ar.fore = forecast:::forecast.Arima(sk.arima, h = 6)
Stationary Series
There are three basic criterion for a series to be classified as stationary series :
1. The mean of the series should not be a function of time rather should be a constant. The image below has the left hand graph satisfying the condition whereas the graph in red has a time dependent mean.
2. The variance of the series should not a be a function of time. This property is known as homoscedasticity. Following graph depicts what is and what is not a stationary series. (Notice the varying spread of distribution in the right hand graph)
3. The covariance of the i th term and the (i + m) th term should not be a function of time. In the following graph, you will notice the spread becomes closer as the time increases. Hence, the covariance is not constant with time for the ‘red series’.
Why do I care about ‘stationarity’ of a time series?
The reason I took up this section first was that until unless your time series is stationary, you cannot build a time series model. In cases where the stationary criterion are violated, the first requisite becomes to stationarize the time series and then try stochastic models to predict this time series. There are multiple ways of bringing this stationarity. Some of them are Detrending, Differencing etc.
Random Walk
This is the most basic concept of the time series. You might know the concept well. But, I found many people in the industry who interprets random walk as a stationary process. In this section with the help of some mathematics, I will make this concept crystal clear for ever. Let’s take an example.
Example: Imagine a girl moving randomly on a giant chess board. In this case, next position of the girl is only dependent on the last position.
Now imagine, you are sitting in another room and are not able to see the girl. You want to predict the position of the girl with time. How accurate will you be? Of course you will become more and more inaccurate as the position of the girl changes. At t=0 you exactly know where the girl is. Next time, she can only move to 8 squares and hence your probability dips to 1/8 instead of 1 and it keeps on going down. Now let’s try to formulate this series :
X(t) = X(t-1) + Er(t)
where Er(t) is the error at time point t. This is the randomness the girl brings at every point in time.
Now, if we recursively fit in all the Xs, we will finally end up to the following equation :
X(t) = X(0) + Sum(Er(1),Er(2),Er(3).....Er(t))
Now, lets try validating our assumptions of stationary series on this random walk formulation:
1. Is the Mean constant ?
E[X(t)] = E[X(0)] + Sum(E[Er(1)],E[Er(2)],E[Er(3)].....E[Er(t)])
We know that Expectation of any Error will be zero as it is random.
Hence we get E[X(t)] = E[X(0)] = Constant.
2. Is the Variance constant?
Var[X(t)] = Var[X(0)] + Sum(Var[Er(1)],Var[Er(2)],Var[Er(3)].....Var[Er(t)])
Var[X(t)] = t * Var(Error) = Time dependent.
Hence, we infer that the random walk is not a stationary process as it has a time variant variance. Also, if we check the covariance, we see that too is dependent on time.
Let’s spice up things a bit,
We already know that a random walk is a non-stationary process. Let us introduce a new coefficient in the equation to see if we can make the formulation stationary.
Introduced coefficient : Rho
X(t) = Rho * X(t-1) + Er(t)
Now, we will vary the value of Rho to see if we can make the series stationary. Here we will interpret the scatter visually and not do any test to check stationarity.
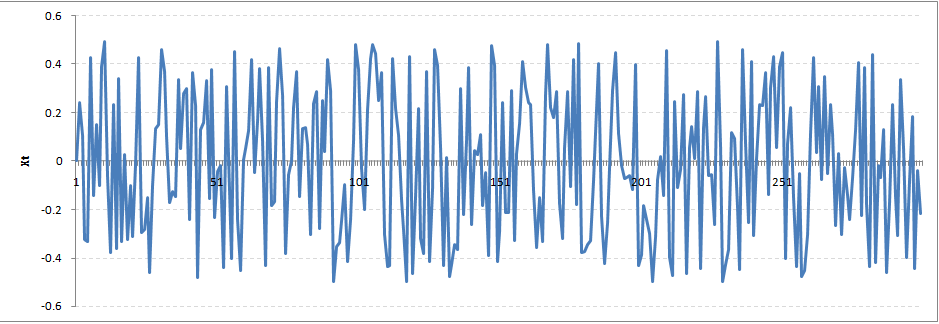
Let’s start with a perfectly stationary series with Rho = 0 . Here is the plot for the time series :
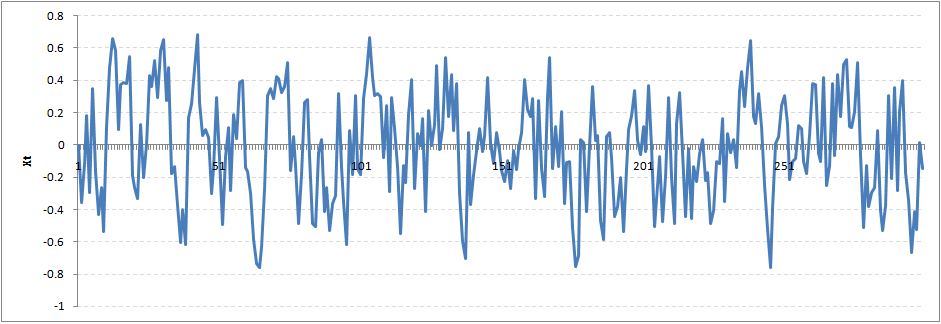
Increase the value of Rho to 0.5 gives us following graph :
You might notice that our cycles have become broader but essentially there does not seem to be a serious violation of stationary assumptions. Let’s now take a more extreme case of Rho = 0.9
We still see that the X returns back from extreme values to zero after some intervals. This series also is not violating non-stationarity significantly. Now, let’s take a look at the random walk with rho = 1.
This obviously is an violation to stationary conditions. What makes rho = 1 a special case which comes out badly in stationary test? We will find the mathematical reason to this.
Let’s take expectation on each side of the equation “X(t) = Rho * X(t-1) + Er(t)”
E[X(t)] = Rho *E[ X(t-1)]
This equation is very insightful. The next X (or at time point t) is being pulled down to Rho * Last value of X.
For instance, if X(t – 1 ) = 1, E[X(t)] = 0.5 ( for Rho = 0.5) . Now, if X moves to any direction from zero, it is pulled back to zero in next step. The only component which can drive it even further is the error term. Error term is equally probable to go in either direction. What happens when the Rho becomes 1? No force can pull the X down in the next step.
Dickey Fuller Test of Stationarity (i.e. Ha: TS is stationary or Rho<1 o:p="">
adf.test(skseries, alternative = "stationary", k=0)
What you just learnt in the last section is formally known as Dickey Fuller test. Here is a small tweak which is made for our equation to convert it to a Dickey Fuller test:
X(t) = Rho * X(t-1) + Er(t)
=> X(t) - X(t-1) = (Rho - 1) X(t - 1) + Er(t)
We have to test if Rho – 1 is significantly different than zero or not. If the null hypothesis gets rejected, we’ll get a stationary time series.
Stationary testing and converting a series into a stationary series are the most critical processes in a time series modelling. You need to memorize each and every detail of this concept to move on to the next step of time series modelling.
Let’s now consider an example to show you what a time series looks like.
If Rho=1: Time Series is not stationary (Null Hypothesis)
If Rho<1: hypothesis="" is="" lternative="" o:p="" series="" stationary="" time="">
2. Exploration of Time Series Data in R
Here we’ll learn to handle time series data on R. Our scope will be restricted to data exploring in a time series type of data set and not go to building time series models.
I have used an inbuilt data set of R called AirPassengers. The dataset consists of monthly totals of international airline passengers, 1949 to 1960.
Loading the Data Set
Following is the code which will help you load the data set and spill out a few top level metrics.
> data(AirPassengers)
> class(AirPassengers)
[1] "ts"
> class(AirPassengers)
[1] "ts"
#This tells you that the data series is in a time series format
> start(AirPassengers)
[1] 1949 1
> start(AirPassengers)
[1] 1949 1
#This is the start of the time series
> end(AirPassengers)
[1] 1960 12
[1] 1960 12
#This is the end of the time series
> frequency(AirPassengers)
[1] 12
[1] 12
#The cycle of this time series is 12months in a year
> summary(AirPassengers)
Min. 1st Qu. Median Mean 3rd Qu. Max.
104.0 180.0 265.5 280.3 360.5 622.0
> summary(AirPassengers)
Min. 1st Qu. Median Mean 3rd Qu. Max.
104.0 180.0 265.5 280.3 360.5 622.0
Detailed Metrics
#The number of passengers are distributed across the spectrum
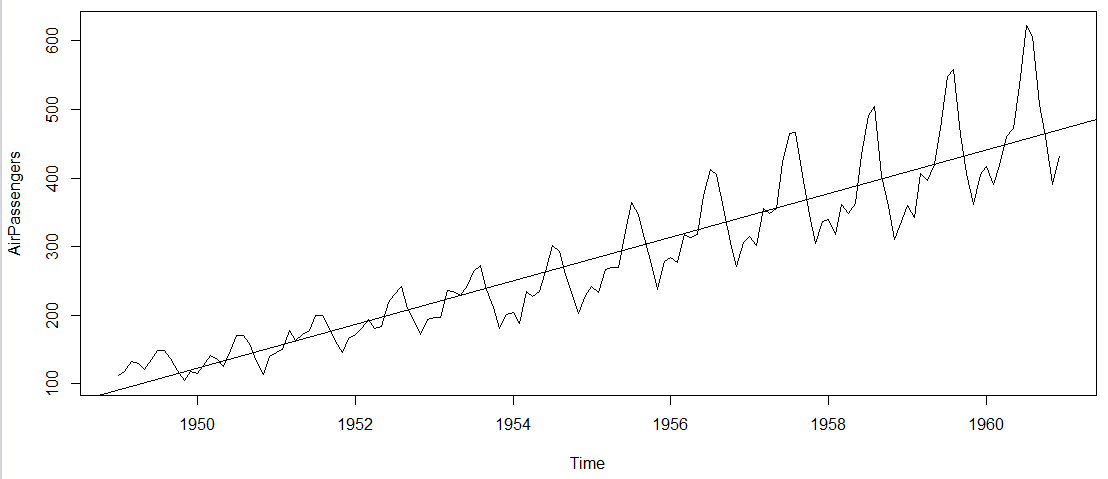
> plot(AirPassengers)
#This will plot the time series
>abline(reg=lm(AirPassengers~time(AirPassengers)))
# This will fit in a line
Here are a few more operations you can do:
> cycle(AirPassengers)
#This will print the cycle across years.
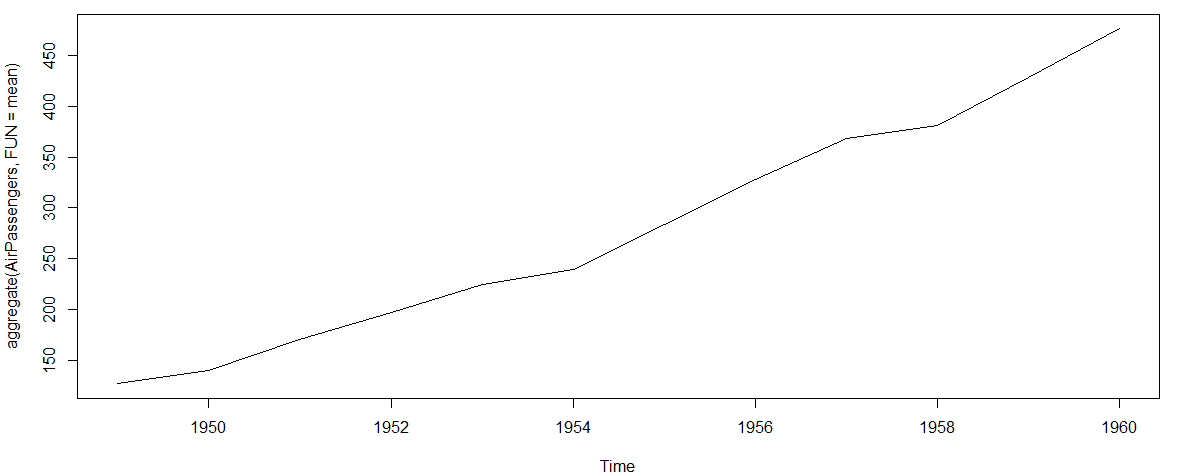
>plot(aggregate(AirPassengers,FUN=mean))
#This will aggregate the cycles and display a year on year trend
> boxplot(AirPassengers~cycle(AirPassengers))
#Box plot across months will give us a sense on seasonal effect
Important Inferences
1. The year on year trend clearly shows that the #passengers have been increasing without fail.
2. The variance and the mean value in July and August is much higher than rest of the months.
3. Even though the mean value of each month is quite different their variance is small. Hence, we have strong seasonal effect with a cycle of 12 months or less.
Exploring data becomes most important in a time series model – without this exploration, you will not know whether a series is stationary or not. As in this case we already know many details about the kind of model we are looking out for.
Let’s now take up a few time series models and their characteristics. We will also take this problem forward and make a few predictions.
3. Introduction to ARMA Time Series Modeling
ARMA models are commonly used in time series modeling. In ARMA model, AR stands for auto-regression and MA stands for moving average. If these words sound intimidating to you, worry not – I’ll simplify these concepts in next few minutes for you!
We will now develop a knack for these terms and understand the characteristics associated with these models. But before we start, you should remember, AR or MA are not applicable on non-stationary series.
In case you get a non stationary series, you first need to stationarize the series (by taking difference / transformation) and then choose from the available time series models.
First, I’ll explain each of these two models (AR & MA) individually. Next, we will look at the characteristics of these models.
Auto-Regressive Time Series Model
Let’s understanding AR models using the case below:
The current GDP of a country say x(t) is dependent on the last year’s GDP i.e. x(t – 1). The hypothesis being that the total cost of production of products & services in a country in a fiscal year (known as GDP) is dependent on the set up of manufacturing plants / services in the previous year and the newly set up industries / plants / services in the current year. But the primary component of the GDP is the former one.
Hence, we can formally write the equation of GDP as:
x(t) = alpha * x(t – 1) + error (t)
This equation is known as AR(1) formulation. The numeral one (1) denotes that the next instance is solely dependent on the previous instance. The alpha is a coefficient which we seek so as to minimize the error function. Notice that x(t- 1) is indeed linked to x(t-2) in the same fashion. Hence, any shock to x(t) will gradually fade off in future.
For instance, let’s say x(t) is the number of juice bottles sold in a city on a particular day. During winters, very few vendors purchased juice bottles. Suddenly, on a particular day, the temperature rose and the demand of juice bottles soared to 1000. However, after a few days, the climate became cold again. But, knowing that the people got used to drinking juice during the hot days, there were 50% of the people still drinking juice during the cold days. In following days, the proportion went down to 25% (50% of 50%) and then gradually to a small number after significant number of days. The following graph explains the inertia property of AR series:
Moving Average Time Series Model
Let’s take another case to understand Moving average time series model.
A manufacturer produces a certain type of bag, which was readily available in the market. Being a competitive market, the sale of the bag stood at zero for many days. So, one day he did some experiment with the design and produced a different type of bag. This type of bag was not available anywhere in the market. Thus, he was able to sell the entire stock of 1000 bags (lets call this as x(t) ). The demand got so high that the bag ran out of stock. As a result, some 100 odd customers couldn’t purchase this bag. Lets call this gap as the error at that time point. With time, the bag had lost its woo factor. But still few customers were left who went empty handed the previous day. Following is a simple formulation to depict the scenario :
x(t) = beta * error(t-1) + error (t)
If we try plotting this graph, it will look something like this :
Did you notice the difference between MA and AR model? In MA model, noise / shock quickly vanishes with time. The AR model has a much lasting effect of the shock.
Difference between AR and MA models
The primary difference between an AR and MA model is based on the correlation between time series objects at different time points. The correlation between x(t) and x(t-n) for n > order of MA is always zero. This directly flows from the fact that covariance between x(t) and x(t-n) is zero for MA models (something which we refer from the example taken in the previous section). However, the correlation of x(t) and x(t-n) gradually declines with n becoming larger in the AR model. This difference gets exploited irrespective of having the AR model or MA model. The correlation plot can give us the order of MA model.
Exploiting ACF and PACF plots
Once we have got the stationary time series, we must answer two primary questions:
Q1. Is it an AR or MA process?
Q2. What order of AR or MA process do we need to use?
The trick to solve these questions is available in the previous section. Didn’t you notice?
The first question can be answered using Total Correlation Chart (also known as Auto – correlation Function / ACF). ACF is a plot of total correlation between different lag functions. For instance, in GDP problem, the GDP at time point t is x(t). We are interested in the correlation of x(t) with x(t-1) , x(t-2) and so on. Now let’s reflect on what we have learnt above.
In a moving average series of lag n, we will not get any correlation between x(t) and x(t – n -1) . Hence, the total correlation chart cuts off at nth lag. So it becomes simple to find the lag for a MA series. For an AR series this correlation will gradually go down without any cut off value. So what do we do if it is an AR series?
Here is the second trick. If we find out the partial correlation of each lag, it will cut off after the degree of AR series. For instance,if we have a AR(1) series, if we exclude the effect of 1st lag (x (t-1) ), our 2nd lag (x (t-2) ) is independent of x(t). Hence, the partial correlation function (PACF) will drop sharply after the 1st lag. Following are the examples which will clarify any doubts you have on this concept :
ACF PACF
The blue line above shows significantly different values than zero. Clearly, the graph above has a cut off on PACF curve after 2nd lag which means this is mostly an AR(2) process.
ACF PACF
Clearly, the graph above has a cut off on ACF curve after 2nd lag which means this is mostly a MA(2) process.
Till now, we have covered on how to identify the type of stationary series using ACF & PACF plots. Now, I’ll introduce you to a comprehensive framework to build a time series model. In addition, we’ll also discuss about the practical applications of time series modelling.
4. Framework and Application of ARIMA Time Series Modeling
A quick revision, Till here we’ve learnt basics of time series modeling, time series in R and ARMA modeling. Now is the time to join these pieces and make an interesting story.
Overview of the Framework
This framework(shown below) specifies the step by step approach on ‘How to do a Time Series Analysis‘:
As you would be aware, the first three steps have already been discussed above. Nevertheless, the same has been delineated briefly below:
Step 1: Visualize the Time Series
It is essential to analyze the trends prior to building any kind of time series model. The details we are interested in pertains to any kind of trend, seasonality or random behaviour in the series. We have covered this part in the second part of this series.
Step 2: Stationarize the Series
Once we know the patterns, trends, cycles and seasonality , we can check if the series is stationary or not. Dickey – Fuller is one of the popular test to check the same. We have covered this test in the first part of this article series. This doesn’t ends here! What if the series is found to be non-stationary?
There are three commonly used technique to make a time series stationary:
1. Detrending : Here, we simply remove the trend component from the time series. For instance, the equation of my time series is:
x(t) = (mean + trend * t) + error
We’ll simply remove the part in the parentheses and build model for the rest.
2. Differencing : This is the commonly used technique to remove non-stationarity. Here we try to model the differences of the terms and not the actual term. For instance,
x(t) – x(t-1) = ARMA (p , q)
This differencing is called as the Integration part in AR(I)MA. Now, we have three parameters
p : AR
d : I
q : MA
3. Seasonality : Seasonality can easily be incorporated in the ARIMA model directly. More on this has been discussed in the applications part below.
Step 3: Find Optimal Parameters
The parameters p,d,q can be found using ACF and PACF plots. An addition to this approach is can be, if both ACF and PACF decreases gradually, it indicates that we need to make the time series stationary and introduce a value to “d”.
Step 4: Build ARIMA Model
With the parameters in hand, we can now try to build ARIMA model. The value found in the previous section might be an approximate estimate and we need to explore more (p,d,q) combinations. The one with the lowest BIC and AIC should be our choice. We can also try some models with a seasonal component. Just in case, we notice any seasonality in ACF/PACF plots.
Step 5: Make Predictions
Once we have the final ARIMA model, we are now ready to make predictions on the future time points. We can also visualize the trends to cross validate if the model works fine.
Applications of Time Series Model
Now, we’ll use the same example that we have used above. Then, using time series, we’ll make future predictions. We recommend you to check out the example before proceeding further.
Where did we start ?
Following is the plot of the number of passengers with years. Try and make observations on this plot before moving further in the article.
Here are my observations :
1. There is a trend component which grows the passenger year by year.
2. There looks to be a seasonal component which has a cycle less than 12 months.
3. The variance in the data keeps on increasing with time.
We know that we need to address two issues before we test stationary series. One, we need to remove unequal variances. We do this using log of the series. Two, we need to address the trend component. We do this by taking difference of the series. Now, let’s test the resultant series.
adf.test(diff(log(AirPassengers)), alternative="stationary", k=0)
Augmented Dickey-Fuller Test
data: diff(log(AirPassengers))
Dickey-Fuller = -9.6003, Lag order = 0,
p-value = 0.01
alternative hypothesis: stationary
Dickey-Fuller = -9.6003, Lag order = 0,
p-value = 0.01
alternative hypothesis: stationary
We see that the series is stationary enough to do any kind of time series modelling.
Next step is to find the right parameters to be used in the ARIMA model. We already know that the ‘d’ component is 1 as we need 1 difference to make the series stationary. We do this using the Correlation plots. Following are the ACF plots for the series :
#ACF Plots
acf(log(AirPassengers))
What do you see in the chart shown above?
Clearly, the decay of ACF chart is very slow, which means that the population is not stationary. We have already discussed above that we now intend to regress on the difference of logs rather than log directly. Let’s see how ACF and PACF curve come out after regressing on the difference.
acf(diff(log(AirPassengers)))
pacf(diff(log(AirPassengers)))
Clearly, ACF plot cuts off after the first lag. Hence, we understood that value of p should be 0 as the ACF is the curve getting a cut off. While value of q should be 1 or 2. After a few iterations, we found that (0,1,1) as (p,d,q) comes out to be the combination with least AIC and BIC.
Let’s fit an ARIMA model and predict the future 10 years. Also, we will try fitting in a seasonal component in the ARIMA formulation. Then, we will visualize the prediction along with the training data. You can use the following code to do the same :
(fit <- 1="" arima="" c="" irpassengers="" log="" period="12)))</span" seasonal="list(order">
pred <- fit="" n.ahead="10*12)</span" predict="">
ts.plot(AirPassengers,2.718^pred$pred, log = "y", lty = c(1,3))
End Notes
With this, we come to this end of tutorial on Time Series Modeling. I hope this will help you to improve your knowledge to work on time based data.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}